
Համաձայն նոր ռազմավարության՝ անօդաչու Driving Industry Institute-ի վիճակագրության՝ 2021 թվականին բացահայտվել են ավելի քան 200 կարևոր ֆինանսավորման իրադարձություններ ինքնավար վարման ոլորտում՝ տանը և արտերկրում՝ մոտ 150 միլիարդ յուան ֆինանսավորման ընդհանուր գումարով (ներառյալ IPO): Ներսում մոտ 70 ֆինանսավորման միջոցառումներ և ավելի քան 30 միլիարդ յուան հավաքագրվել են ցածր արագությամբ անօդաչու արտադրանքի և լուծումների մատակարարների կողմից:
Անցած երկու տարիներին անօդաչու առաքման, անօդաչու մաքրման և անօդաչու պահեստավորման վայրէջքի սցենարները ի հայտ են եկել, և կապիտալի ուժեղ մուտքը անօդաչու մեքենաները մղել է զարգացման «արագ գիծ»: Բազմաֆունկցիոնալ սենսորային միաձուլման տեխնոլոգիայի մշակմամբ, պիոներ ներկայացուցիչները մտան «պրոֆեսիոնալ» թիմ՝ կատարելով տարբեր խնդիրներ, ինչպիսիք են ճանապարհների մաքրումը, տեղադրումը և էքսպրեսը, առաքման առաքումը և այլն:

Անօդաչու մեքենաների մաքրման աշխատանքներ
Որպես «ապագա մասնագիտական մեքենա», որը փոխարինում է աշխատուժին, խոչընդոտներից խուսափելու կիրառվող լուծումները չպետք է անփույթ լինեն՝ զարգացող արդյունաբերությունում հաղթելու համար, և մեքենան պետք է հզորացվի աշխատանքային սցենարի համաձայն, օրինակ՝ անօդաչու մեքենան սանիտարական արդյունաբերության մեջ։ պետք է ունենա պաշարների նույնականացման գործառույթ. առաքման ոլորտում անվտանգ խոչընդոտներից խուսափելու գործառույթով. պահեստավորման արդյունաբերությունում արտակարգ իրավիճակների ռիսկերից խուսափելու գործառույթով……
- Սանիտարական արդյունաբերություն. խելացի զգայարանների եռամիասնությունքիմ

Սանիտարական արդյունաբերություն – Ներկայացված է խելացի զգայական սխեմայի երրորդությունը
Պեկինի ձմեռային օլիմպիական խաղերի «ավելի մաքուր» Candela Sunshine ռոբոտն օգտագործում է եռամիասնություն խելացի զգայական սխեման, որը հագեցած է 19 ուլտրաձայնային ռադարներով, ինչը հնարավորություն է տալիս ռոբոտին ունենալ ամենատարբեր խոչընդոտներից խուսափելու, վարարումների կանխարգելում և հակաթափման գործառույթներ:
All-roundխոչընդոտներից խուսափելը
Հետևի մասում տեղադրված են 2 ուլտրաձայնային ռադարներ՝ հակադարձ մոնիտորինգի և խոչընդոտների նախազգուշացման համար, 3 ուլտրաձայնային ռադարներ առջևի տակ և 6 ուլտրաձայնային ռադարներ կողքերում՝ հորիզոնական, ուղղահայաց և թեք բազմակողմ առաջխաղացման և խոչընդոտներից խուսափելու գործառույթների համար:
Հեղեղումների կանխարգելում
Տեղադրեք սենսոր մեքենայի բեռնման տարածքի վերևում՝ բեռնման իրավիճակի մոնիտորինգի գործառույթն իրականացնելու և բեռնման հզորությունը բավարարելու անվտանգության չափանիշներին ապահովելու համար:
Հակադեմփինգ
Կանխում է ճեղքված հատվածի թեքվելը արտաքին ուժերի պատճառով չբեռնված կամ թերբեռնված վիճակում՝ վտանգելով հանրային անվտանգությունը:
- Առաքման արդյունաբերություն.համապարփակխելացի խոչընդոտներից խուսափելը sքիմ
Առաքման արդյունաբերություն – խոչընդոտներից խուսափելու համապարփակ խելացի սխեմայի մասնակի ցուցադրում
Հեռավոր լոգիստիկայի համեմատ, առաքման արդյունաբերության սցենարի առանցքը գտնվում է կարճ և բարձր հաճախականության մեջ, ինչը նշանակում է, որ անօդաչու առաքման մեքենաները պետք է նախագծված լինեն ավելի ճկուն և անվտանգ՝ դիմակայելու բարդ քաղաքային սցենարներին, ինչպիսիք են շենքերի տեղափոխումը: և նրբանցքի խոչընդոտներից խուսափելը: DYP-ն «Zixing Technology»-ին տրամադրել է խոչընդոտներից խուսափելու համապարփակ խելացի սխեման՝ իր արտադրանքը դարձնելով անօդաչու առաքման մեքենա, որը փորձարկվելու է Չինաստանում կիսաբաց միջավայրում:
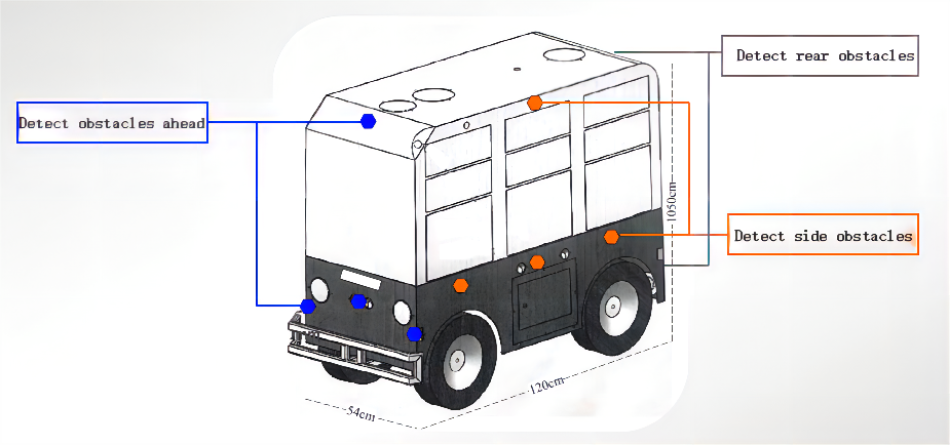
Առջևի և հետևի խոչընդոտներից խուսափելը
Մեկ ուլտրաձայնային ռադար տեղադրված է առջևի և հետևի վերին մասում՝ ավելի բարձր խոչընդոտներ հայտնաբերելու համար, ինչպիսիք են բարձրությունը սահմանափակող բևեռները. Երեք ուլտրաձայնային ռադարներ տեղադրված են առջևի և հետևի մասում ցածր և առջևի կողային խոչընդոտները հայտնաբերելու համար, ինչպիսիք են սահմանափակման բևեռները: Միևնույն ժամանակ, առջևի և հետևի ծայրերում գտնվող ուլտրաձայնային ռադարները կարող են ապահովել անօդաչու մեքենան հետընթացի կամ շրջվելու համար:
Կողմնակի խոչընդոտներից խուսափելը
Յուրաքանչյուր կողմից վերևում տեղադրված է մեկ ուլտրաձայնային ռադար՝ բարձր կողային խոչընդոտները հայտնաբերելու և արագ առաքման գործառույթն ակտիվացնելու համար։ Երեք ուլտրաձայնային ռադարներ տեղադրված են յուրաքանչյուր կողմից ներքևում՝ հայտնաբերելու ցածր կողային խոչընդոտները, ինչպիսիք են ճանապարհի եզրերը, կանաչ գոտիները և կանգնած սյուները: Բացի այդ, ձախ և աջ կողմերի ուլտրաձայնային ռադարները կարողանում են գտնել ճիշտ «կայանատեղի» անօդաչու մեքենայի համար և հաջողությամբ ավարտել ավտոմատ կայանումը:
- Պահպանման արդյունաբերություն. արտակարգ իրավիճակների խուսափում և երթուղու օպտիմալացումzation սքիմ

AGV խոչընդոտներից խուսափելու դիագրամ
Ընդհանուր պահեստային անօդաչու մեքենաները տեղակայված են ինֆրակարմիր և լազերային տեխնոլոգիական լուծումների միջոցով տեղական ուղու պլանավորման համար, սակայն երկուսն էլ ենթարկվում են լույսի ազդեցությանը ճշգրտության առումով, և բախման վտանգները կարող են առաջանալ, երբ մի քանի սայլեր հատվում են պահեստում: Dianyingpu-ն ապահովում է վթարային ռիսկերից խուսափելու և երթուղու օպտիմալացման լուծումներ պահեստային արդյունաբերության համար, որոնք չեն ազդում լույսի վրա՝ օգտագործելով ուլտրաձայնային ռադարը, որն օգնում է պահեստին AGV-ին հասնել պահեստներում խոչընդոտներից ինքնավար խուսափելու, ճգնաժամի ժամանակ ժամանակին և ճշգրիտ կայանմանը՝ բախումներից խուսափելու համար:
Արտակարգ իրավիճակխուսափելը
Երբ ուլտրաձայնային ռադարը հայտնաբերում է, որ խոչընդոտը մտնում է նախազգուշացման տարածք, սենսորը ժամանակին կհաղորդի անօդաչու տրոլեյբուսին մոտակա խոչընդոտի կողմնորոշման տեղեկատվությունը AGV կառավարման համակարգին, իսկ կառավարման համակարգը կկառավարի տրոլեյբուսը դանդաղեցնելու և արգելակելու համար: Այն խոչընդոտների համար, որոնք գտնվում են տրոլեյբուսի առջևի հատվածում, նույնիսկ եթե դրանք մոտ են, ռադարը չի զգուշացնի՝ ապահովելու տրոլեյբուսի աշխատանքի արդյունավետությունը:
Երթուղու օպտիմալացումzation
Անօդաչու մեքենան օգտագործում է լազերային կետային ամպը՝ համակցված բարձր ճշգրտության քարտեզի հետ՝ տեղական ճանապարհի պլանավորման և ընտրվող մի շարք հետագծեր ստանալու համար: Այնուհետև ուլտրաձայնի միջոցով ստացված խոչընդոտների մասին տեղեկատվությունը նախագծվում և հետ է հաշվարկվում մեքենայի կոորդինատների համակարգին, ընտրված ստացված հետագծերը հետագայում զտվում և շտկվում են, վերջապես ստացվում է օպտիմալ հետագիծը, և առաջ շարժումը հիմնված է այս հետագծի վրա:

- Հեռահարությունը մինչև 5 մ,կույր կետ մինչև 3 սմ
- Կայուն, լույսից չազդված ևչափվածի գույնը օբյեկտ
- Բարձր հուսալիություն, հանդիպելտրանսպորտային միջոցների դասի պահանջները
Հրապարակման ժամանակը՝ օգ-30-2022